在读研一的时候第一次接触到子回路消除这个概念,今天特意写一下相关的内容,也算是一个心得与总结,以及一些我对于子回路消除的认知与理解。本文将从一个简单的TSP问题开始讲起,提出模型与消除方法,并使用求解器Gurobi实现各种子回路消除方法。
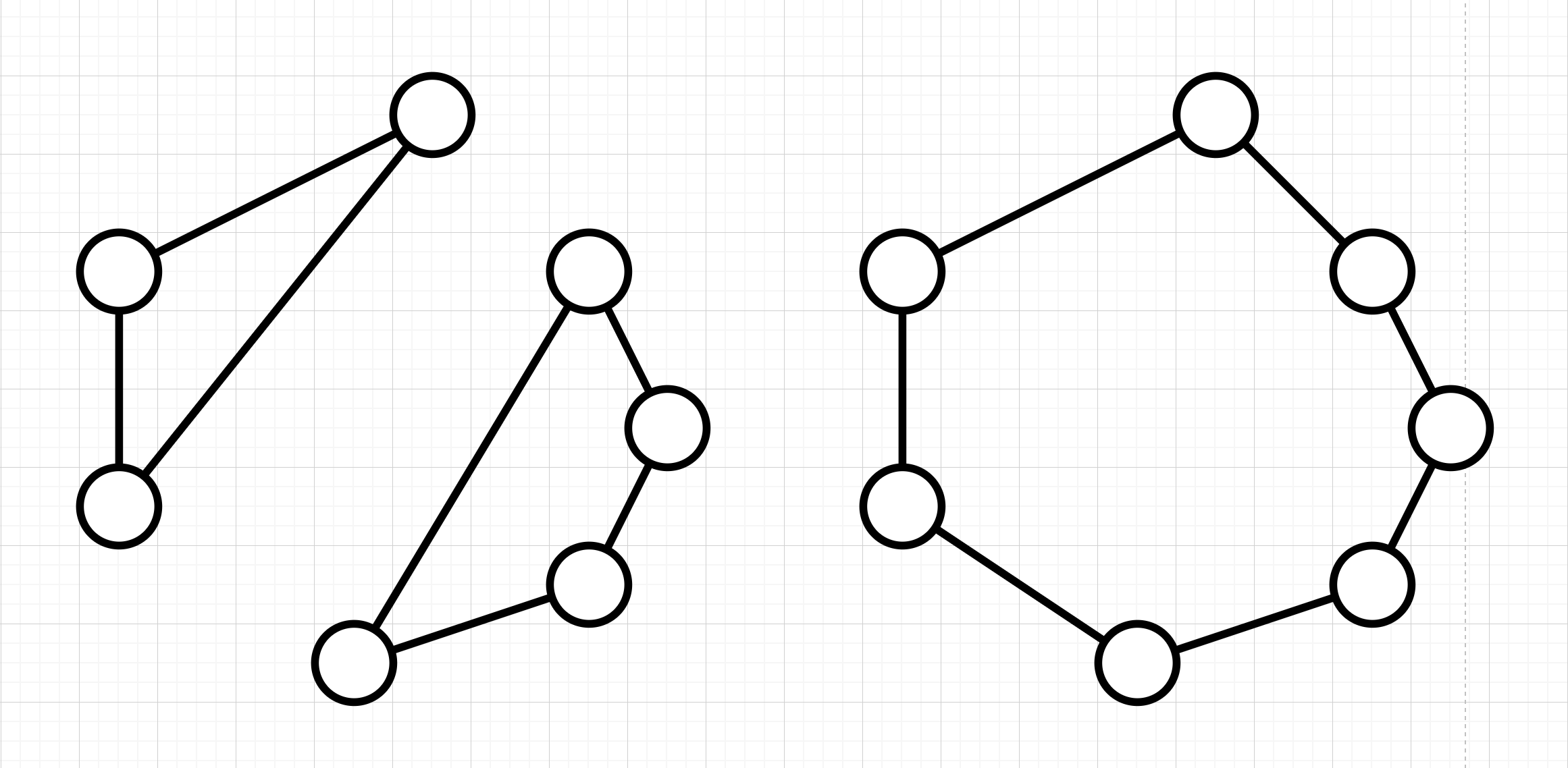
子回路是一个在TSP中和VRP中常见的现象,体现为一辆车走了两个或多个闭环路径。如果不知道VRP和TSP相关的问题与模型,建议补习相关内容。比如下面这张图的TSP问题。正常情况下,一个TSP问题的可行解应该如右图所示,即一辆车遍历所有节点。而左图中,很明显每个点被遍历了,但是竟然出现了两辆车。这显然不符合对于TSP问题的假设。然而在这种情况下(左图),两个回路竟然在数学公式上使用了同一辆车。这就是一个典型的子回路现象。
简单来说,子回路的出现就是我们缺少一部分约束,导致没有完全地刻画问题中车辆的行为。我们知道车辆路径问题(vehicle routing problem, VRP)是旅行商问题(traveling salesman problem, TSP)问题的一个更加困难的版本,与其用一个VRP的例子作为教程,不如使用更为简单的TSP作为上手的开始。因为TSP过于经典,就不再过多赘述。简单来说就是如何以最短的距离不重复地走完地图上所有的城市并且回到出发点,其(不完整的)数学模型如下:
min ∑ i ∈ N ∑ j ∈ N c i j x i j (1) \min \sum_{i\in N} \sum_{j\in N} c_{ij}x_{ij} \tag{1}
min i ∈ N ∑ j ∈ N ∑ c i j x i j ( 1 )
∑ i ∈ N x i j = ∑ i ∈ N x j i = 1 , ∀ j ∈ N (2) \sum_{i\in N} x_{ij} = \sum_{i\in N} x_{ji} = 1, \forall j \in N \tag{2}
i ∈ N ∑ x i j = i ∈ N ∑ x j i = 1 , ∀ j ∈ N ( 2 )
x i j ∈ { 0 , 1 } , ∀ i ∈ N , j ∈ N (3) x_{ij} \in \{0,1\}, \forall i \in N, j\in N \tag{3}
x i j ∈ { 0 , 1 } , ∀ i ∈ N , j ∈ N ( 3 )
上述公式使用了常见的符号集合,N N N c i j c_{ij} c i j
我们观察上面的图的左侧子图,每个点的入度也确实等于出度。也就是说上述的模型是不完整的,我们没有消除子回路的约束。
如上所述,我们需要增加一些约束,这些约束帮助我们消除子回路。这些约束都相当精彩,在领悟其中的原理之后拍手叫绝。
Dantzig-Fulkerson-Johnson 简称 DFJ 方法是消除子回路的经典方法,公式如下:
∑ i ∈ S ∑ j ∉ S x i j ≥ 1 , ∀ S ⊂ N , S ≠ ∅ \sum_{i\in S} \sum_{j \notin S} x_{ij} \ge 1, \forall S \subset N, S \ne \emptyset
i ∈ S ∑ j ∈ / S ∑ x i j ≥ 1 , ∀ S ⊂ N , S = ∅
DFJ约束规定一个节点集合N N N S S S S S S S S S N N N S S S S S S S S S S S S S S S
DFJ约束很简单也很直观,但是问题是约束的数量不是多项式级的,我们不太可能把一个大规模问题的所有的约束枚举出来。
Miller, Tucker, and Zemlin 简称 MTZ 方法也是消除子回路的经典方法,公式如下:
t i − t j + 1 ≤ M ( 1 − x i j ) , ∀ i , j ∈ N , i ≠ j t_i-t_j+1\leq M(1-x_{ij}), \forall i,j\in N,i\neq j
t i − t j + 1 ≤ M ( 1 − x i j ) , ∀ i , j ∈ N , i = j
0 ≤ t i ≤ ∣ N ∣ − 1 , ∀ i ∈ N 0 \le t_i \le |N|-1, \forall i\in N
0 ≤ t i ≤ ∣ N ∣ − 1 , ∀ i ∈ N
MTZ方法引入了一个新的变量,这个变量没有任何物理意义。MTZ公式可以这样理解:i , j i,j i , j ( i , j ) (i,j) ( i , j ) i i i j j j i i i j j j
这个额外的决策变量就是t i , ∀ i ∈ N t_i, \forall i \in N t i , ∀ i ∈ N j j j i i i x i j = 1 x_{ij}=1 x i j = 1 t j ≥ t i + 1 t_j \ge t_i + 1 t j ≥ t i + 1 j j j i i i t j ≥ t i + 1 t_j \ge t_i + 1 t j ≥ t i + 1 t j t_j t j t i t_i t i t i − t j + 1 ≤ M t_i-t_j+1\leq M t i − t j + 1 ≤ M M M M t i − t j + 1 ≤ M ( 1 − x i j ) , ∀ i , j ∈ N , i ≠ j t_i-t_j+1\leq M(1-x_{ij}), \forall i,j\in N,i\neq j t i − t j + 1 ≤ M ( 1 − x i j ) , ∀ i , j ∈ N , i = j M M M ∣ N ∣ |N| ∣ N ∣
如果存在一个子回路,那t i t_i t i t i t_i t i t j t_j t j
在介绍了上述的两个经典的方法之后,以下是一个综述文章,介绍了各种TSP子回路消除方法。感兴趣自己看,这里就不复现了。
A comparative analysis of several asymmetric traveling salesman problem formulations,
上述介绍中已经提到DFJ方法的约束个数是有限的,但是指数级的。我们不太可能用求解器把所有子回路的情况都考虑进去。首先声明这是一个简单的代码,用了20分钟写的简单例子,没有面向对象。
那么 talk is cheap, show me your code。
1 2 3 4 5 import gurobipy as gpimport mathimport randomimport refrom itertools import combinations
extract_numbers()从[a,b]这样的方括号中提取a和b这两个数字,并返回一个list,用于从变量名中提取索引。
1 2 3 4 5 6 7 def extract_numbers (s ): match = re.search(r"\[(\d+),(\d+)\]" , s) if match : return [int (match .group(1 )), int (match .group(2 ))] else : return None
get_tour()函数从一个字典edges中获得一个回路。字典edges的一个键值对是一条弧,键是起点,值是终点。edges={1:2, 3:4, 2:3, 4:1},则得到tour=[1,2,3,4]。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 def get_tour (edges: dict ): tour = [] while True : if len (tour) == 0 : if 0 in edges: tour.append(0 ) tour.append(edges[0 ]) del edges[0 ] else : tmp = list (edges.keys()) tour.append(tmp[0 ]) tour.append(edges[tmp[0 ]]) del edges[tmp[0 ]] else : tmp = edges.get(tour[-1 ]) if tmp == None : break else : tour.append(tmp) del edges[tour[-2 ]] return edges, tour[:-1 ]
mycallback函数为DFJ的约束添加过程,由于这样的约束数量很多无法一次添加,那么使用callback函数进行添加。MIPSOL处(mip solution)如果发现了一个带子回路的解,则添加针对这个回路的DFJ约束。注意,我们假设TSP的起点一定不在子回路里面,也就是只有不带起点的回路才是子回路。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 def mycallback (model, where ): if where == gp.GRB.Callback.MIPSOL: var_val = model.cbGetSolution(model._var) edges = {} for i in range (len (var_val)): if var_val[i] > 0.5 : tmp = extract_numbers(model._var[i].VarName) edges.update({tmp[0 ]: tmp[1 ]}) flag_subtour = False edges, tour = get_tour(edges) if len (tour) < model._node_num: flag_subtour = True if flag_subtour: edges, tour = get_tour(edges) assert len (tour) < model._node_num pairs = [(i, j) for i in tour for j in tour if i != j] lexp = 0 for p in pairs: lexp += model.getVarByName("x[" + str (p[0 ]) + "," + str (p[1 ]) + "]" ) model.cbLazy(lexp <= len (tour) - 1 )
使用DFJ方法的模型。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 def solve_tsp_dfj (nodes, distances ): model = gp.Model() x = model.addVars( distances.keys(), obj=distances, vtype=gp.GRB.BINARY, name="x" ) model.addConstrs(gp.quicksum(x[i, j] for j in nodes if i != j) == 1 for i in nodes) model.addConstrs(gp.quicksum(x[j, i] for j in nodes if i != j) == 1 for i in nodes) model.update() model._var = model.getVars() model._node_num = len (nodes) model.Params.LazyConstraints = 1 model.optimize(mycallback) if model.Status == gp.GRB.OPTIMAL: edges = {} for i in range (len (model._var)): if model._var[i].X > 0.5 : tmp = extract_numbers(model._var[i].VarName) edges.update({tmp[0 ]: tmp[1 ]}) edges, tour = get_tour(edges) print (tour) print (f"路径中点的个数:{len (tour)} " ) print (f"路径长度:{model.ObjVal} " )
使用MTZ方法的模型。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 def solve_tsp_mtz (nodes, distances ): model = gp.Model() x = model.addVars( distances.keys(), obj=distances, vtype=gp.GRB.BINARY, name="x" ) t = model.addVars((i for i in nodes), vtype=gp.GRB.CONTINUOUS, name='t' ) model.addConstrs(gp.quicksum(x[i, j] for j in nodes if i != j) == 1 for i in nodes) model.addConstrs(gp.quicksum(x[j, i] for j in nodes if i != j) == 1 for i in nodes) node_without_starts = copy.deepcopy(nodes) node_without_starts.remove(0 ) model.addConstrs( t[i] - t[j] + 1 <= len (nodes) * (1 - x[(i, j)]) for i in node_without_starts for j in node_without_starts if i != j ) model.update() model._node_num = len (nodes) model.optimize() if model.Status == gp.GRB.OPTIMAL: edges = {} for i in nodes: for j in nodes: if i != j: if model.getVarByName("x[" + str (i) + "," + str (j) + "]" ).X > 0.5 : edges.update({i:j}) edges, tour = get_tour(edges) print (tour) print (f"路径中点的个数:{len (tour)} " ) print (f"路径长度:{model.ObjVal} " )
主程序生成一个50个点的TSP问题,同一个问题使用两种方法求解。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 if __name__ == "__main__" : npoints = int (50 ) seed = int (41372890 ) random.seed(seed) nodes = list (range (npoints)) points = [(random.randint(0 , 100 ), random.randint(0 , 100 )) for i in nodes] distances = { (i, j): math.sqrt(sum ((points[i][k] - points[j][k]) ** 2 for k in range (2 ))) for i, j in combinations(nodes, 2 ) } for i, j in combinations(nodes, 2 ): distances.update({(j, i): distances[(i, j)]}) solve_tsp_dfj(nodes, distances) solve_tsp_mtz(nodes, distances)